

Prototype Handheld Ophthalmic Probe
Designing a first-ever dual function probe for diagnostic imaging of the eye
I was thrilled to have the chance to be involved at the early stages of this project and be able to see it through to its deployment. My role was the mechanical design, fabrication, and development lead and I worked alongside the lead optics planner to form a cohesive design.
Being handheld, the goal from the beginning was to have as lightweight a final product as reasonable. As a prototype device, though, I balanced this need against the expense and difficulty in working with low weight materials such as titanium or carbon fiber, ultimately choosing a low density and highly machinable aluminum alloy.
In considering the tightness of tolerances, I was often trading off between ease of manufacturing and the achievable positional precision of concerned optical elements. Fortunately, the optical plan provided the allowable error in positions and angles for each optical element relative to one another. I used these numbers to back out the maximum allowable tolerance for a given mechanical dimension to minimize any unnecessary overtolerancing. This brought down our cost and time to manufacture considerably.

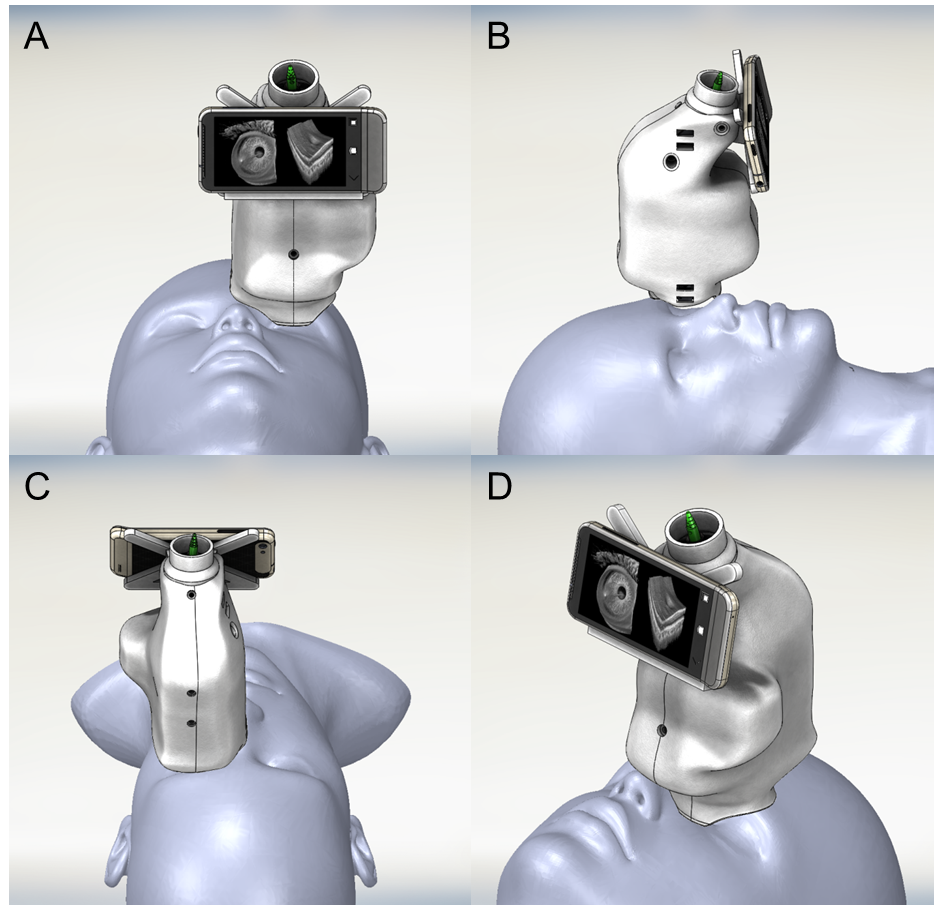
When it comes to handheld medical devices, there is not a consensus on the universally preferred method of holding a device because of the varieties in which even the same device can be used. In this case, imaging the eye of an upright or supine patient from short distance, handheld devices have a particularly large number of ergonomic variants: "camera" grip, "pistol" grip, "pencil" grip, etc. Through research and interfacing with the end users, clinicians, I narrowed down the variants to a few possible preferences. Knowing, however, that there would still be a number of iterations to work through, I needed a way to make several accurately modeled options for housing cheaply and quickly. Compounding this problem was that I was working in parallel on the fabrication of the optomechanical designs inside the probe, i.e. I didn't have access to the actualized internals while I was designing the external aspect.
The solution was 3D printing. Rapid prototyping is neatly suited to this sort of problem as a fast and economical way to present physical approximations of what a final product might look and feel like. I generated several designs for enclosures based on the previously garnered feedback from our clinical collaborators and printed the designs. I attached a mass on a lever arm inside each of the designs that would accurately portray the weight and center of mass of the final probe so that the clinicians could give the best possible feedback on the designs. This early and accurate representation of possible ergonomic solutions saved time and effort after the optomechanical designs came back from fabrication in that the complete assembly was already ready to go.
The publication describing the device and the results can be found here:
Biomedical Optics Express: Handheld, rapidly switchable, anterior/posterior segment swept source optical coherence tomography probe.

